Vous aimez nos contenus ?
Recevez chaque jour nos dernières publications gratuitement et directement dans votre boite mail
Interview de Logu, développeur web d’UX-Republic sur le projet Polo & Marco
Comment avez-vous eu l’idée ?
La force des hackathons est de créer un événement autour d’un thème à explorer avec des idées et des personnes qu’on ne connaissait pas quelques heures auparavant.
Nous nous sommes rencontrés – Logu, développeur web d’UX-Republic et Clément, géographe-urbaniste – à l’occasion du hackathon Zone 61 organisé par Microsoft et AXA autour des objets connectés. En échangeant le vendredi soir, nous avons découvert notre intérêt commun pour la robotique et la cartographie. Nous avons commencé à lister nos compétences et savoir-faire, ainsi que le matériel à disposition pour construire un robot. Ainsi naquit le projet Polo & Marco.
Parlez-nous du projet ?
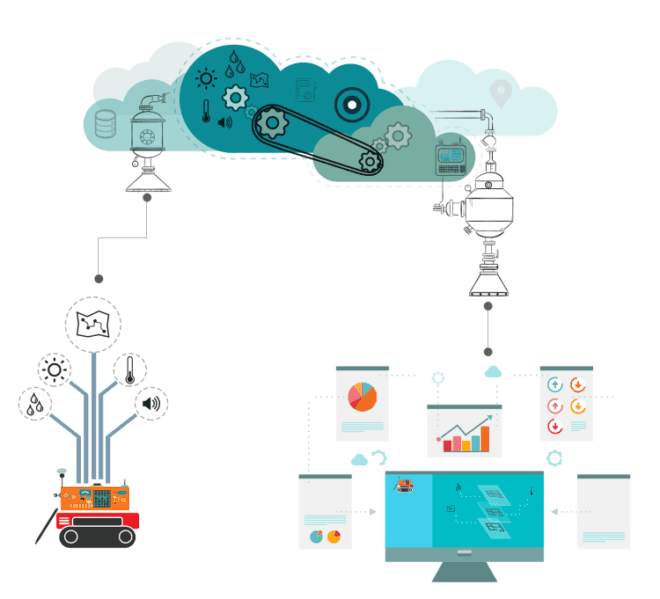
Dans un contexte où l’on parle d’ambiant intelligent, nous pensons qu’il faut parler de conscience. La connaissance de l’environnement, beaucoup développée avec des capteurs, est trop limitée. Nous avons choisi de rendre mobiles les capteurs pour améliorer la qualité des données collectées et éliminer de nombreux biais dans leur analyse. Nous développons donc un service de cartographie de l’environnement ambiant grâce à des robots d’exploration.
Pour le challenge, nous travaillons sur une première version de Polo, un véhicule doté de différents capteurs qui peut se faufiler dans tous les recoins d’une habitation, d’un immeuble de bureau ou d’un bâtiment industriel.
Polo est pensé comme un assistant à tous les professionnels du diagnostic énergétique, du bâtiment. Notre service leur permet de s’affranchir du travail de collecte et de représentation des données pour se concentrer sur leur coeur de métier qui est le conseil et l’expertise.
Quels ont été vos principaux défis ?
Nos principaux défis sont essentiellement d’ordres techniques.
Tout d’abord, nous devons optimiser l’exploration du robot pour qu’il puisse circuler partout, collecter et représenter le plus précisément les outils. Nous avons choisi d’intégrer la technologie LIDAR pour ce faire.Ensuite, nous devons nous familiariser avec le Machine Learning, puisque la conscience permet l’intelligence. Nous espérons pouvoir rendre nos robots plus prédictifs et efficaces dans la découverte de nouveaux environnements. Enfin, nous avons l’ambition à terme d’améliorer notre service avec l’ajout d’un drone : Marco. La communication Machine to Machine sera alors au coeur de ce développement futur.
Quelle est la technologie utilisé et pourquoi ?
Pour la première version de Polo, nous avons retenu les technologies suivantes :
une Raspberry Pi sur laquelle a été installé ROS, l’OS spécialisé en robotique afin de collecter et d’envoyer les données collectées par les différents capteurs ; un arduino pour gérer la motricité du robot ; dans le cadre du Challenge, nous exploitons la technologie Microsoft Azure pour structurer nos données ; enfin, nous développons une interface utilisateur web en javascript sur nodeJS.
Comment voyez-vous l’évolution de votre projet ?
Nous sommes très motivés par le fait de porter une communauté open source autour du développement des robots d’exploration. Cette forme de R&D ouverte permettra à de nombreux champs professionnels de développer leurs applications.Pour notre part, nous allons nous concentrer sur le développement du service de cartographie de l’environnement ambiant. Finaliste du hackathon, le projet continue jusqu’au 24 mars.
Pour nous épauler, d’autres valeureux d’UX-Republic ont rejoint l’équipe comme Mickael UX-evangelist et Claire UX-activist. Ce projet s’inscrit dans le cadre du lab UX-Republic: UX STAR LAB et vient marquer son lancement.